アルゴリズムは writing_algorithm.html に移転しています!!
My web-page on Let us study on
Let
us study on optimization
problem is now moved to writing_algorithm.html
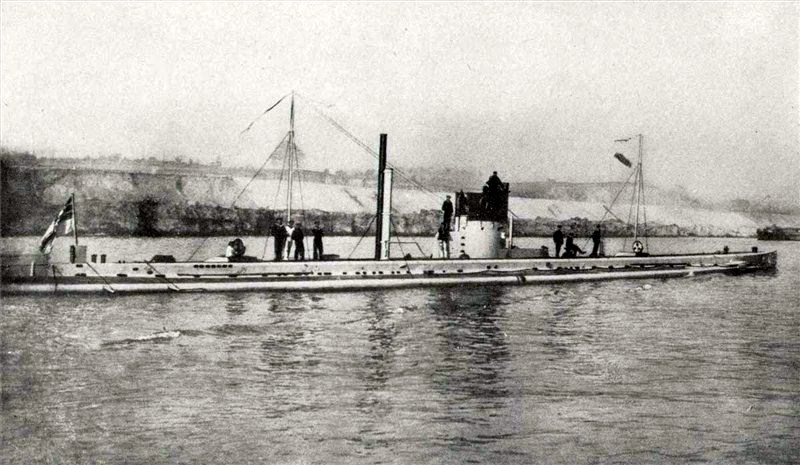
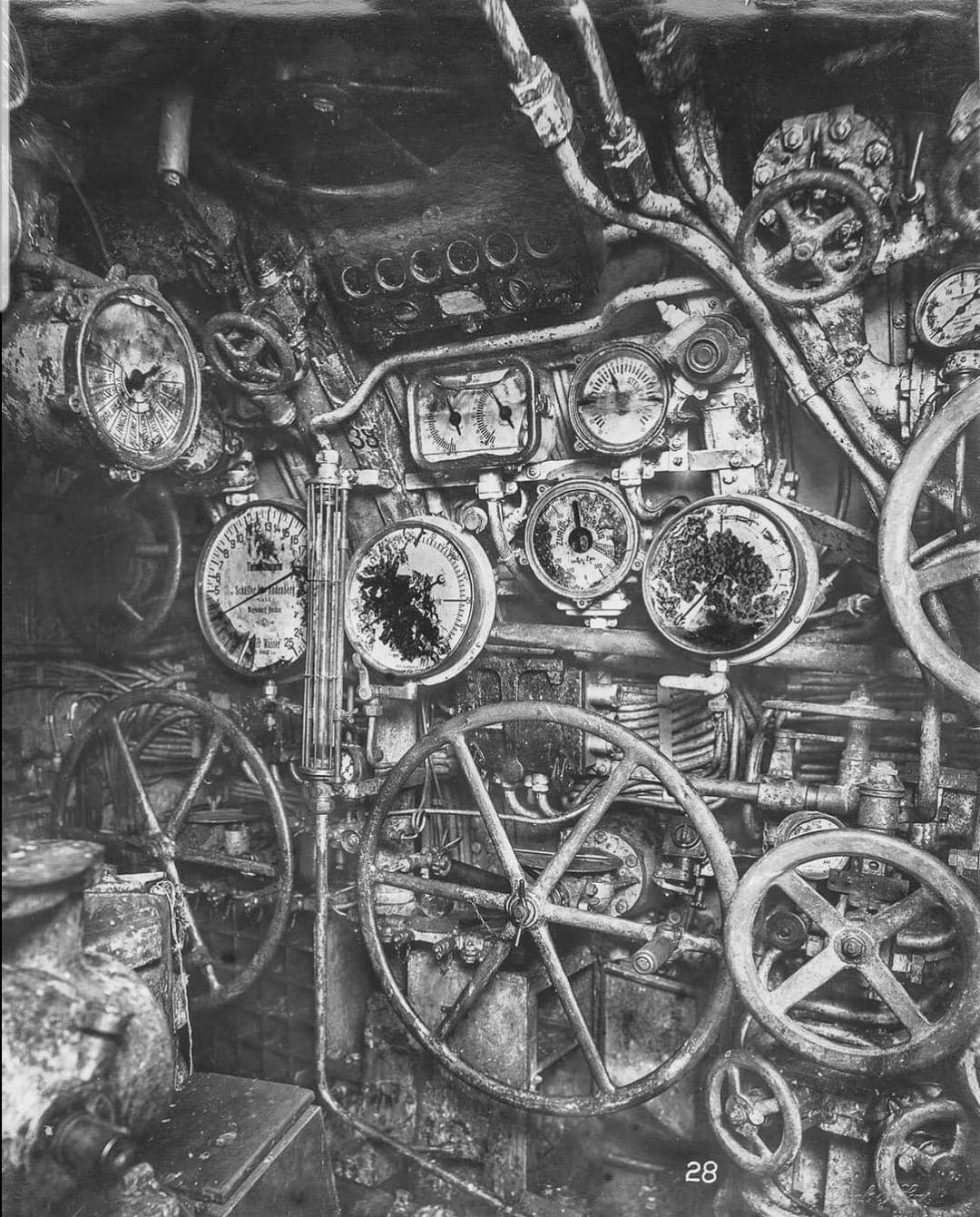
U9 (1914) and Inside of WW1 era U-boat
アルゴリズムは writing_algorithm.html に移転しています!!
My web-page on Let us study on Let us study on optimization problem is now moved to writing_algorithm.html
U9 (1914) and Inside of WW1 era U-boat